Hello, please advise if I enter M600 in the dashboard macro or directly into the console, it works. When I have M600 in Gcode in Orca, the printer only moves to the pause position and then attempts to retract, resulting in a firmware reset. Can anyone advise why this is occurring? Thank you.
Are actually on a MAX?!?
You may want to start a thread under the correct heading.
What slicer are you using?
Hello, if there was an extra sv08 max group in the forum then I would have written this in there. And it says in the post that I use Orca.
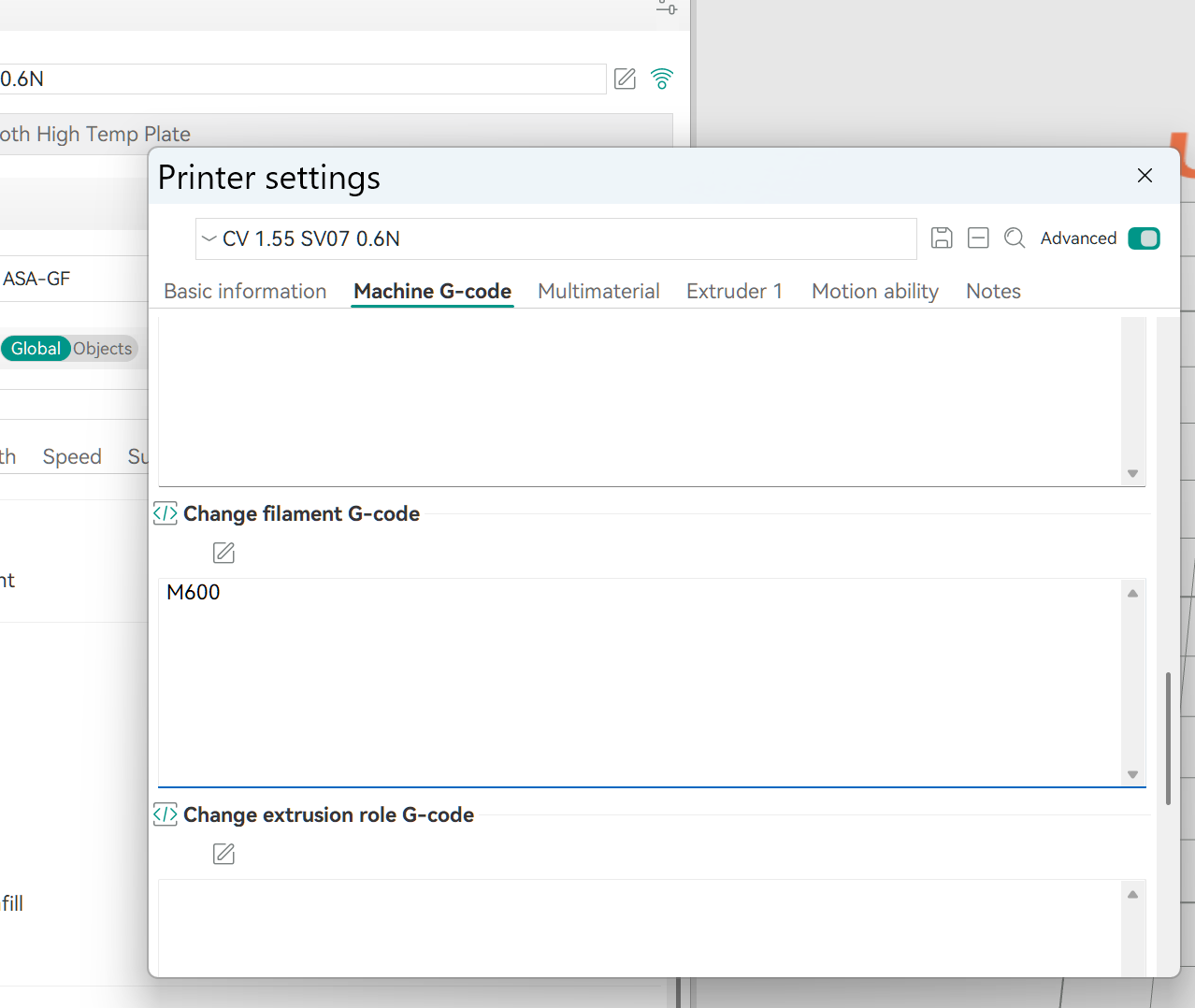
Check your “Machine g-code” in Orca for pause
Hello,
I have modified your message by changing the category to SV08 MAX.
This category exists.
Hello, please advise if I enter M600 in the dashboard macro or directly into the console, it works. When I have M600 in Gcode in Orca, the printer only moves to the pause position and then attempts to retract, resulting in a firmware reset. Can anyone advise why this is occurring? Thank you.
Hello,
This is your second thread on the same subject.
I am merging the two.
That’s just not how it works. I have m600 when changing the filament and Pause when pausing. Pause works. M600 it moves to the front and tries to do the retract and firmware restarts. According to the gcode, however, only m600 is in the file, which I have checked.
@sovol3d
You should open a support ticket (email info@sovol3d.com. Include your order number)
The “push buffer” greatly complicates filament changes. The buffer has its own buffer_stepper.cfg
If you drill into macro.cfg you will find that Sovol has “redirected” M600 to set a variable to filament_change then call the pause macro.
The pause macro then reads that variable and does a bunch of stuff with the runout sensor and the eventually calls UNLOAD_FILAMENT or BUFFER_LONG_UNLOAD_FILAMENT
Upload a zipped copy of your klippy.log and I MIGHT be able to point you in the right direction but it is a long shot.
thanks, I’ll do it tonight. I had already seen that with the variable. But I find it a strange solution. But pause is therefore not necessarily a priority. When pausing, I then go to unload on the display and it also does it and pushes the 70cm filament back. I won’t do it often anyway, but one or two plates could be done in 50cm.
I’m having the same issue. Natively the profile does not respond to a colour change in Orca, so I added the M600 code to the Change Filament section. Klipper shuts down.
According to the console log, the problem seems to be “Macro PAUSE called recursively” causing an unhandled exception.
Here is the relevant section of the klippy log:
filament change
Pause Print!
Stats 116613.9: gcodein=0 mcu: mcu_awake=0.003 mcu_task_avg=0.000002 mcu_task_stddev=0.000002 bytes_write=225166936 bytes_read=37947421 bytes_retransmit=0 bytes_invalid=0 send_seq=4146820 receive_seq=4146820 retransmit_seq=0 srtt=0.004 rttvar=0.003 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=399997777 buffer_mcu: mcu_awake=0.001 mcu_task_avg=0.000010 mcu_task_stddev=0.000006 bytes_write=2818128 bytes_read=3645046 bytes_retransmit=0 bytes_invalid=0 send_seq=192720 receive_seq=192720 retransmit_seq=0 srtt=0.002 rttvar=0.002 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72005013 adj=72005383 extra_mcu: mcu_awake=0.002 mcu_task_avg=0.000014 mcu_task_stddev=0.000009 bytes_write=69408251 bytes_read=13912232 bytes_retransmit=0 bytes_invalid=0 send_seq=1270863 receive_seq=1270863 retransmit_seq=0 srtt=0.001 rttvar=0.001 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72003665 adj=72004169 sd_pos=7470 mcu_temp: temp=47.2 Host_temp: temp=56.3 heater_bed: target=80 temp=80.1 pwm=0.357 sysload=0.74 cputime=15727.716 memavail=636584 print_time=67568.870 buffer_time=5.069 print_stall=0 extruder: target=265 temp=265.4 pwm=0.494
Stats 116614.9: gcodein=0 mcu: mcu_awake=0.005 mcu_task_avg=0.000002 mcu_task_stddev=0.000002 bytes_write=225167174 bytes_read=37947871 bytes_retransmit=0 bytes_invalid=0 send_seq=4146838 receive_seq=4146838 retransmit_seq=0 srtt=0.001 rttvar=0.001 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=399997781 buffer_mcu: mcu_awake=0.001 mcu_task_avg=0.000011 mcu_task_stddev=0.000006 bytes_write=2818134 bytes_read=3645075 bytes_retransmit=0 bytes_invalid=0 send_seq=192721 receive_seq=192721 retransmit_seq=0 srtt=0.002 rttvar=0.002 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72005015 adj=72005418 extra_mcu: mcu_awake=0.006 mcu_task_avg=0.000016 mcu_task_stddev=0.000014 bytes_write=69408285 bytes_read=13912372 bytes_retransmit=0 bytes_invalid=0 send_seq=1270866 receive_seq=1270866 retransmit_seq=0 srtt=0.001 rttvar=0.001 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72003659 adj=72004048 sd_pos=7470 mcu_temp: temp=47.2 Host_temp: temp=58.0 heater_bed: target=80 temp=80.1 pwm=0.331 sysload=0.74 cputime=15727.790 memavail=636416 print_time=67568.870 buffer_time=4.068 print_stall=0 extruder: target=265 temp=265.6 pwm=0.494
Don’t unload filament during printing!!!
Stats 116615.9: gcodein=0 mcu: mcu_awake=0.005 mcu_task_avg=0.000002 mcu_task_stddev=0.000002 bytes_write=225168278 bytes_read=37948341 bytes_retransmit=0 bytes_invalid=0 send_seq=4146869 receive_seq=4146869 retransmit_seq=0 srtt=0.002 rttvar=0.001 rto=0.025 ready_bytes=16 upcoming_bytes=48 freq=399997921 buffer_mcu: mcu_awake=0.001 mcu_task_avg=0.000011 mcu_task_stddev=0.000006 bytes_write=2818140 bytes_read=3645091 bytes_retransmit=0 bytes_invalid=0 send_seq=192722 receive_seq=192722 retransmit_seq=0 srtt=0.002 rttvar=0.001 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72005020 adj=72005422 extra_mcu: mcu_awake=0.006 mcu_task_avg=0.000016 mcu_task_stddev=0.000014 bytes_write=69408456 bytes_read=13912507 bytes_retransmit=0 bytes_invalid=0 send_seq=1270871 receive_seq=1270871 retransmit_seq=0 srtt=0.001 rttvar=0.001 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72003681 adj=72004009 sd_pos=7470 mcu_temp: temp=47.2 Host_temp: temp=57.2 heater_bed: target=80 temp=80.1 pwm=0.331 sysload=0.74 cputime=15727.918 memavail=635968 print_time=67572.007 buffer_time=6.204 print_stall=0 extruder: target=265 temp=265.9 pwm=0.494
Stats 116616.9: gcodein=0 mcu: mcu_awake=0.005 mcu_task_avg=0.000002 mcu_task_stddev=0.000002 bytes_write=225168548 bytes_read=37948741 bytes_retransmit=0 bytes_invalid=0 send_seq=4146886 receive_seq=4146886 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=16 upcoming_bytes=0 freq=399998009 buffer_mcu: mcu_awake=0.001 mcu_task_avg=0.000011 mcu_task_stddev=0.000006 bytes_write=2818765 bytes_read=3645602 bytes_retransmit=0 bytes_invalid=0 send_seq=192754 receive_seq=192754 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72005022 adj=72005312 extra_mcu: mcu_awake=0.006 mcu_task_avg=0.000016 mcu_task_stddev=0.000014 bytes_write=69408538 bytes_read=13912661 bytes_retransmit=0 bytes_invalid=0 send_seq=1270877 receive_seq=1270877 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72003691 adj=72004007 sd_pos=7470 mcu_temp: temp=47.2 Host_temp: temp=57.7 heater_bed: target=80 temp=80.1 pwm=0.331 sysload=0.74 cputime=15728.066 memavail=636228 print_time=67572.007 buffer_time=5.203 print_stall=0 extruder: target=265 temp=265.9 pwm=0.534
Stats 116617.9: gcodein=0 mcu: mcu_awake=0.005 mcu_task_avg=0.000002 mcu_task_stddev=0.000002 bytes_write=225168786 bytes_read=37949170 bytes_retransmit=0 bytes_invalid=0 send_seq=4146903 receive_seq=4146903 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=399997990 buffer_mcu: mcu_awake=0.001 mcu_task_avg=0.000011 mcu_task_stddev=0.000006 bytes_write=2818799 bytes_read=3645664 bytes_retransmit=0 bytes_invalid=0 send_seq=192757 receive_seq=192757 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72005021 adj=72005241 extra_mcu: mcu_awake=0.006 mcu_task_avg=0.000016 mcu_task_stddev=0.000014 bytes_write=69408604 bytes_read=13912796 bytes_retransmit=0 bytes_invalid=0 send_seq=1270882 receive_seq=1270882 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72003682 adj=72003977 sd_pos=7470 mcu_temp: temp=47.5 Host_temp: temp=57.0 heater_bed: target=80 temp=80.1 pwm=0.331 sysload=0.68 cputime=15728.158 memavail=636064 print_time=67572.007 buffer_time=4.202 print_stall=0 extruder: target=265 temp=265.5 pwm=0.677
Stats 116618.9: gcodein=0 mcu: mcu_awake=0.005 mcu_task_avg=0.000002 mcu_task_stddev=0.000002 bytes_write=225169040 bytes_read=37949580 bytes_retransmit=0 bytes_invalid=0 send_seq=4146922 receive_seq=4146922 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=399997976 buffer_mcu: mcu_awake=0.001 mcu_task_avg=0.000011 mcu_task_stddev=0.000006 bytes_write=2818833 bytes_read=3645726 bytes_retransmit=0 bytes_invalid=0 send_seq=192760 receive_seq=192760 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72005020 adj=72005255 extra_mcu: mcu_awake=0.006 mcu_task_avg=0.000016 mcu_task_stddev=0.000014 bytes_write=69408686 bytes_read=13912936 bytes_retransmit=0 bytes_invalid=0 send_seq=1270888 receive_seq=1270888 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72003675 adj=72003951 sd_pos=7470 mcu_temp: temp=47.3 Host_temp: temp=56.9 heater_bed: target=80 temp=80.1 pwm=0.364 sysload=0.68 cputime=15728.237 memavail=635872 print_time=67572.007 buffer_time=3.202 print_stall=0 extruder: target=265 temp=265.6 pwm=0.596
Stats 116619.9: gcodein=0 mcu: mcu_awake=0.004 mcu_task_avg=0.000002 mcu_task_stddev=0.000002 bytes_write=225169278 bytes_read=37950001 bytes_retransmit=0 bytes_invalid=0 send_seq=4146940 receive_seq=4146940 retransmit_seq=0 srtt=0.001 rttvar=0.001 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=399997974 buffer_mcu: mcu_awake=0.004 mcu_task_avg=0.000015 mcu_task_stddev=0.000011 bytes_write=2818867 bytes_read=3645803 bytes_retransmit=0 bytes_invalid=0 send_seq=192763 receive_seq=192763 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72005020 adj=72005261 extra_mcu: mcu_awake=0.003 mcu_task_avg=0.000015 mcu_task_stddev=0.000011 bytes_write=69408736 bytes_read=13913094 bytes_retransmit=0 bytes_invalid=0 send_seq=1270892 receive_seq=1270892 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72003666 adj=72003925 sd_pos=7470 mcu_temp: temp=47.5 Host_temp: temp=57.5 heater_bed: target=80 temp=80.1 pwm=0.268 sysload=0.68 cputime=15728.323 memavail=635444 print_time=67572.007 buffer_time=2.201 print_stall=0 extruder: target=265 temp=265.7 pwm=0.519
Stats 116620.9: gcodein=0 mcu: mcu_awake=0.004 mcu_task_avg=0.000002 mcu_task_stddev=0.000002 bytes_write=225169516 bytes_read=37950428 bytes_retransmit=0 bytes_invalid=0 send_seq=4146958 receive_seq=4146958 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=11 upcoming_bytes=0 freq=399997959 buffer_mcu: mcu_awake=0.004 mcu_task_avg=0.000015 mcu_task_stddev=0.000011 bytes_write=2818901 bytes_read=3645865 bytes_retransmit=0 bytes_invalid=0 send_seq=192766 receive_seq=192766 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72005020 adj=72005264 extra_mcu: mcu_awake=0.003 mcu_task_avg=0.000015 mcu_task_stddev=0.000011 bytes_write=69408770 bytes_read=13913219 bytes_retransmit=0 bytes_invalid=0 send_seq=1270895 receive_seq=1270895 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72003661 adj=72003885 sd_pos=7470 mcu_temp: temp=47.4 Host_temp: temp=57.2 heater_bed: target=80 temp=80.1 pwm=0.271 sysload=0.68 cputime=15728.402 memavail=635220 print_time=67572.007 buffer_time=1.200 print_stall=0 extruder: target=265 temp=265.7 pwm=0.519
Stats 116621.9: gcodein=0 mcu: mcu_awake=0.004 mcu_task_avg=0.000002 mcu_task_stddev=0.000002 bytes_write=225169884 bytes_read=37950838 bytes_retransmit=0 bytes_invalid=0 send_seq=4146977 receive_seq=4146977 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=399997961 buffer_mcu: mcu_awake=0.004 mcu_task_avg=0.000015 mcu_task_stddev=0.000011 bytes_write=2818935 bytes_read=3645927 bytes_retransmit=0 bytes_invalid=0 send_seq=192769 receive_seq=192769 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72005020 adj=72005275 extra_mcu: mcu_awake=0.003 mcu_task_avg=0.000015 mcu_task_stddev=0.000011 bytes_write=69408836 bytes_read=13913354 bytes_retransmit=0 bytes_invalid=0 send_seq=1270900 receive_seq=1270900 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72003677 adj=72003874 sd_pos=7470 mcu_temp: temp=47.5 Host_temp: temp=56.6 heater_bed: target=80 temp=80.1 pwm=0.327 sysload=0.68 cputime=15728.515 memavail=634300 print_time=67572.007 buffer_time=0.200 print_stall=0 extruder: target=265 temp=265.6 pwm=0.548
Stats 116622.9: gcodein=0 mcu: mcu_awake=0.004 mcu_task_avg=0.000002 mcu_task_stddev=0.000002 bytes_write=225170106 bytes_read=37951238 bytes_retransmit=0 bytes_invalid=0 send_seq=4146994 receive_seq=4146994 retransmit_seq=0 srtt=0.001 rttvar=0.001 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=399997959 buffer_mcu: mcu_awake=0.004 mcu_task_avg=0.000015 mcu_task_stddev=0.000011 bytes_write=2819518 bytes_read=3646045 bytes_retransmit=0 bytes_invalid=0 send_seq=192781 receive_seq=192781 retransmit_seq=0 srtt=0.001 rttvar=0.001 rto=0.025 ready_bytes=14 upcoming_bytes=596 freq=72005028 adj=72005274 extra_mcu: mcu_awake=0.003 mcu_task_avg=0.000015 mcu_task_stddev=0.000011 bytes_write=69408902 bytes_read=13913503 bytes_retransmit=0 bytes_invalid=0 send_seq=1270905 receive_seq=1270905 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72003742 adj=72003951 sd_pos=7470 mcu_temp: temp=47.5 Host_temp: temp=57.8 heater_bed: target=80 temp=80.1 pwm=0.327 sysload=0.63 cputime=15728.707 memavail=635376 print_time=67622.406 buffer_time=49.598 print_stall=0 extruder: target=265 temp=265.7 pwm=0.476
Stats 116623.9: gcodein=0 mcu: mcu_awake=0.004 mcu_task_avg=0.000002 mcu_task_stddev=0.000002 bytes_write=225170344 bytes_read=37951672 bytes_retransmit=0 bytes_invalid=0 send_seq=4147012 receive_seq=4147012 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=11 upcoming_bytes=0 freq=399997959 buffer_mcu: mcu_awake=0.004 mcu_task_avg=0.000015 mcu_task_stddev=0.000011 bytes_write=2819566 bytes_read=3646107 bytes_retransmit=0 bytes_invalid=0 send_seq=192784 receive_seq=192784 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=14 upcoming_bytes=582 freq=72005030 adj=72005435 extra_mcu: mcu_awake=0.003 mcu_task_avg=0.000015 mcu_task_stddev=0.000011 bytes_write=69408952 bytes_read=13913633 bytes_retransmit=0 bytes_invalid=0 send_seq=1270909 receive_seq=1270909 retransmit_seq=0 srtt=0.001 rttvar=0.000 rto=0.025 ready_bytes=0 upcoming_bytes=0 freq=72003742 adj=72004192 sd_pos=7470 mcu_temp: temp=47.3 Host_temp: temp=57.2 heater_bed: target=80 temp=80.1 pwm=0.309 sysload=0.63 cputime=15728.798 memavail=635668 print_time=67622.406 buffer_time=48.598 print_stall=0 extruder: target=265 temp=266.0 pwm=0.412
Filament jam detected! Push pin is still triggered after move.
Macro PAUSE called recursively
Unhandled exception during run
Traceback (most recent call last):
File “/home/sovol/klipper/klippy/klippy.py”, line 177, in run
self.reactor.run()
File “/home/sovol/klipper/klippy/reactor.py”, line 292, in run
g_next.switch()
File “/home/sovol/klipper/klippy/reactor.py”, line 340, in _dispatch_loop
timeout = self._check_timers(eventtime, busy)
File “/home/sovol/klipper/klippy/reactor.py”, line 158, in _check_timers
t.waketime = waketime = t.callback(eventtime)
File “/home/sovol/klipper/klippy/reactor.py”, line 48, in invoke
res = self.callback(eventtime)
File “/home/sovol/klipper/klippy/extras/buffer_stepper.py”, line 75, in
lambda evt: self._check_filament_jam(evt, initial_push_state, check_id),
File “/home/sovol/klipper/klippy/extras/buffer_stepper.py”, line 132, in _check_filament_jam
self.gcode.run_script_from_command(“PAUSE”)
File “/home/sovol/klipper/klippy/gcode.py”, line 226, in run_script_from_command
self._process_commands(script.split(‘\n’), need_ack=False)
File “/home/sovol/klipper/klippy/gcode.py”, line 211, in _process_commands
handler(gcmd)
File “/home/sovol/klipper/klippy/gcode.py”, line 137, in
func = lambda params: origfunc(self._get_extended_params(params))
File “/home/sovol/klipper/klippy/extras/gcode_macro.py”, line 182, in cmd
raise gcmd.error(“Macro %s called recursively” % (self.alias,))
gcode.CommandError: Macro PAUSE called recursively
Transition to shutdown state: Unhandled exception during run
invoke_shutdown mcu_msg: , msg: Unhandled exception during run
Dumping gcode input 0 blocks

Edited per your suggestion.
I have a kludgy work-around. In Orca Machine G-code setting, type PAUSE (in caps) for the filament change g-code.
The machine will pause immediately after printing the purge line and before starting the print (which may be a clue to the recursive error in my log). Hit the “Play” button and it will begin the print.
It will pause at the filament change layer. Manually do a long material retract, load the new colour, extend the filament (twice, to purge the nozzle) and then hit play again to finish the print.
PITA, but it works.
@sovol3d Please notify the Dev team that M600 is broken on the Max